华为的ADS 3.0在阿维塔上的首秀,就已经能完成从车位到车位的全程智驾过程了。
ADS 3.0也是端到端模式,也是大网+多模块的底层架构;包括阿维塔和享界的部分测试信息来验证这套系统好用程度,确实,ADS 3.0应该是目前国内最好用的智能驾驶配置。实测起来真实的第一感受和ADS 2.0比较像,其实对用户来说是好事,没有在更新后出现体验感上的回退,或者需要重新适应新版本的使用感受,用相对稳定的驾驶体验来延续到3.0版本,挺好,但这不是该夸的点。
在内测之后,预估ADS 3.0全量推送后的使用感受,是上车就能开启智驾模式,泊出、自动出停车场,然后顺着园区或小区的内部道路驶入城区开放道路内,顺利通过复杂路口到达公司所在停车场,并且泊入车位。
以上全流程,是ADS 3.0在测试版中想表达的使用效果,也应该至少是全量推送后,想要落地的真实使用效果。
从家到公司,无需再接管?
感受过ADS 3.0的全流程智能驾驶,或者说你看过它的部分测试视频之后,应该大致和我有同感,不用再去等特斯拉FSD新版本落地国内了,实现的功能应该差不多,可能还没有华为ADS 3.0的好用(毕竟感知硬件有差异)。
虽然这次首秀的实测路况相对来说,比较短,而且复杂程度一般(封闭场地内,没有其他社会车辆)。在测试过程中,并没有出现接管的情况,经历了从车位泊出开启智能驾驶,绕行、避让、施工道路的路径规划等,整个全流程除了没有园区内道路、进出停车场闸机的工况外,基本都涵盖了。
全量推送之后,是否具备无需接管的能力?
ADS 3.0相比2.0或者目前其他的智驾功能,在使用端最大的区别,是智能驾驶开启的时间更早,涉及的工况更为全面了;在底层架构端,最大的区别,是从之前的多网,变成了大网多模块的架构逻辑,从技术先进性上看大网的架构无疑更好,但模型的完全成熟并且得到验证,需要一个时间周期去打磨。
需不需要被接管,其实是取决于整套系统它对于当下所处的场景的理解能力;也取决于它是否符合人类驾驶员的驾驶逻辑,可能路径规划不同、距离临侧车太近,也会被迫接管。
从这次的ADS 3.0首秀来看,可以大概确认两件事:
- 这套系统对于场景的理解能力,很好,而且相应速度很快,看来ADS 3.0的模型演进已经有一段时间,至少拿出来最终全量推的模型,不会是初代的模型版本;
- 在大网架构之后,拿到了更精准的一手感知数据之后,让整套系统做决策的时间也明显缩短,会更快速的找出第一路径,或者再次寻找第二路径。
全量推送后,ADS 3.0是具备无需被接管的能力的。也是基于实测后感知到的上面两个能力点,场景理解能力强+决策响应更迅速之后,带来的产品功能上的优势。至少在首秀的30多分钟的道路中,没有出现被接管的情况,哪怕是刹停之后做第二决策的速度也是相对来说更快。而且对于路面上,更低、更小的物体也能在100米左右的距离做出感知,降速绕行没有明显的犹豫痕迹(大网拿到原始感知数据的好处)。
其实把这套功能的体验感受,发散到真实用车工况下,从家里的车位到公司地库的车位,难点可以说,只是自动进出闸机的那两下。
除了少降级,还有啥优点?
从分段架构,到了一张网的底层架构之后,带来的优势其一是能够更快的做出决策,不再限制于变道取消之后的二次路径选择,也不局限于复杂路口实时重新规划路径的能力;其二,是在场景理解能力更好的前提下,它能减少降级的出现。
ADS 2.0系统下,在面对异形障碍物时,通过GAEB(相当于将GOD网络融入到AEB,自动刹车系统中)来探测和避开异形障碍物。这种技术,是允许系统在遇到不规则的异形物体时候,可以灵活处理避免碰撞的。不过,这种处理是需要系统对环境进行实时扫图和理解,在某些情况下可能会导致系统需要更多的处理时间、算力,尤其是在复杂的城市路口或者是环岛环境中。
所以,我们会在ADS 2.0的时候发现遇到异形障碍物、环岛或者复杂路口的时候,有降级的情况出现。就是因为GOD+AEB分段式的网络,在数据和数据传递的时候会耗费大量的时间和算力,以及路径规划的博弈。
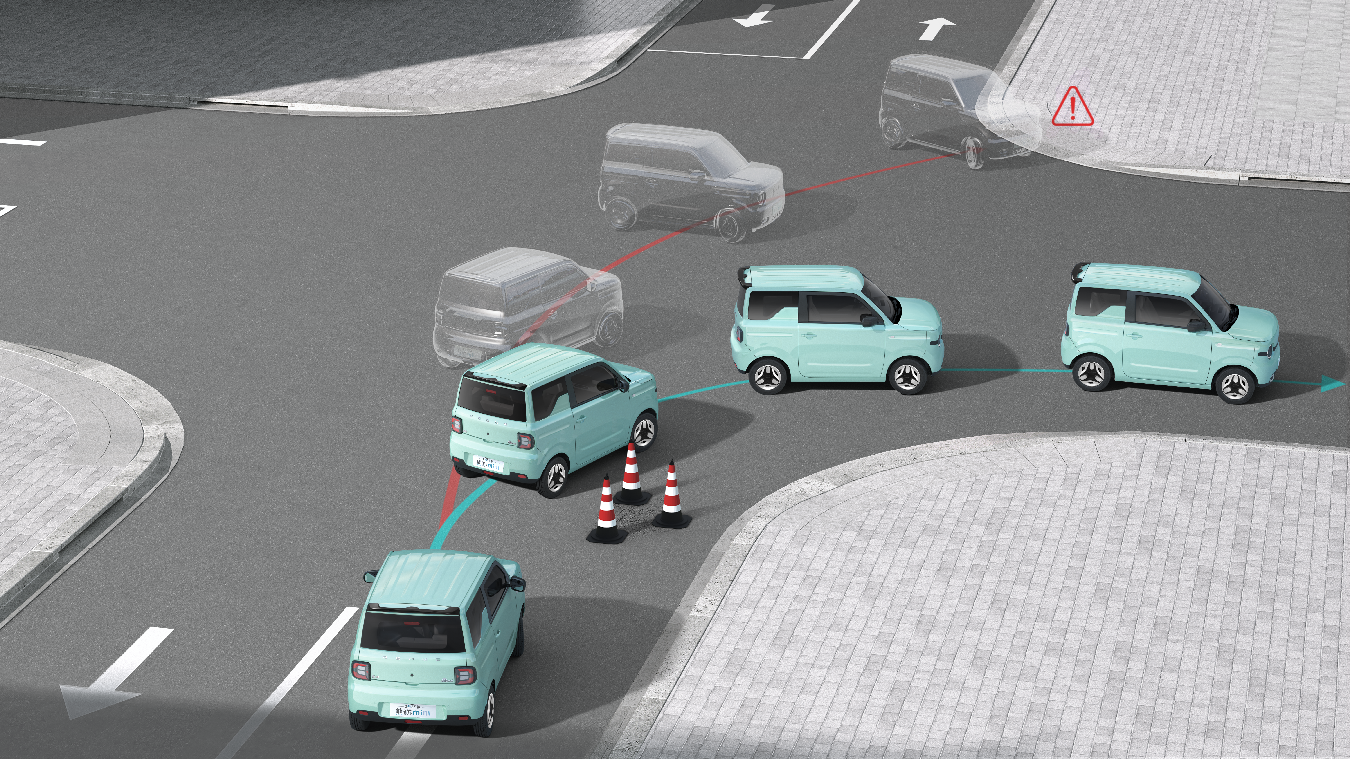
但在阿维塔的ADS 3.0首秀中,我们发现了这套系统的两个特点,宁可慢速、减速或者刹停再重新做规划,也不会轻易出现从NOA功能降级到LCC功能;还有,就是在避障过后的路径规划,是合理可控而且平稳的。
包括在假人避让、小动物避让以及前车掉落物品的避让上,都能做出合理的路径规划,而且也没有明显的急刹车情况出现。这说明了,它在感知以及决策的响应速度,是更快的(相较于ADS 2.0也相较于其他智能驾驶功能)。
做出避让,其实不算难事,难点在避让后的路径规划上,怎么才可以快速、精准且舒适的回归到合理的路线上,才是难点。至少这一点华为ADS 3.0做的不错,也是因为有了大网架构之后,能让决策和规控层面的响应速度更快,这应该是绝大多数ADS 3.0系统用户们能在城区NOA中感觉到的变化之一。应该在复杂路口上的处理做的也会有提升,只不过这次阿维塔的ADS 3.0首秀中没展示出来。
然后,泊车域层面,是否有内测时候说的那么好?
对于在路测的侧方停车,也可以依靠激光雷达对设置的细小障碍物达成精准的识别,并且能顺利的挺到车位中。虽然通过内测还无法验证,是否可以达到中途下车解开地锁然后顺利完成泊车,或者骑着马路牙子完成泊车;但,目前ADS 3.0在泊车端的优势还是体现出来了,在端到端的大网架构出来之后,拿到一手的感知数据后可以让决策以及执行端都能提速,而且感知数据更加精准。
所以,在这次的首秀来看,ADS 3.0的泊车功能,是更快、更准确而且不限制于是否有4D毫米波雷达。理论上其实激光雷达方案也有提升的,毕竟架构上的调整,让激光雷达的数据利用率跟充分了;而加了4D毫米波之后,应该是可以实现上述内测中的泊车功能。